#include "stdafx.h"
#include <dlib/image_processing/frontal_face_detector.h>
#include <dlib/image_processing/render_face_detections.h>
#include <dlib/image_processing.h>
#include <dlib/gui_widgets.h>
#include <dlib/image_io.h>
#include
using namespace dlib;
using namespace std;
// ----------------------------------------------------------------------------------------
int main(int argc, char** argv)
{
try
{
// We need a face detector. We will use this to get bounding boxes for
// each face in an image.
frontal_face_detector detector = get_frontal_face_detector();
// And we also need a shape_predictor. This is the tool that will predict face
// landmark positions given an image and face bounding box. Here we are just
// loading the model from the shape_predictor_68_face_landmarks.dat file you gave
// as a command line argument.
shape_predictor sp;
deserialize("shape_predictor_68_face_landmarks.dat") >> sp;
image_window win, win_faces;
// Loop over all the images provided on the command line.
//for (int i = 2; i < argc; ++i)
//{
//cout << "processing image " << argv[i] << endl;
array2d img;
string img_path = "got.jpg";
//load_image(img, argv[i]);
load_image(img, img_path);
// Make the image larger so we can detect small faces.
pyramid_up(img);
// Now tell the face detector to give us a list of bounding boxes
// around all the faces in the image.
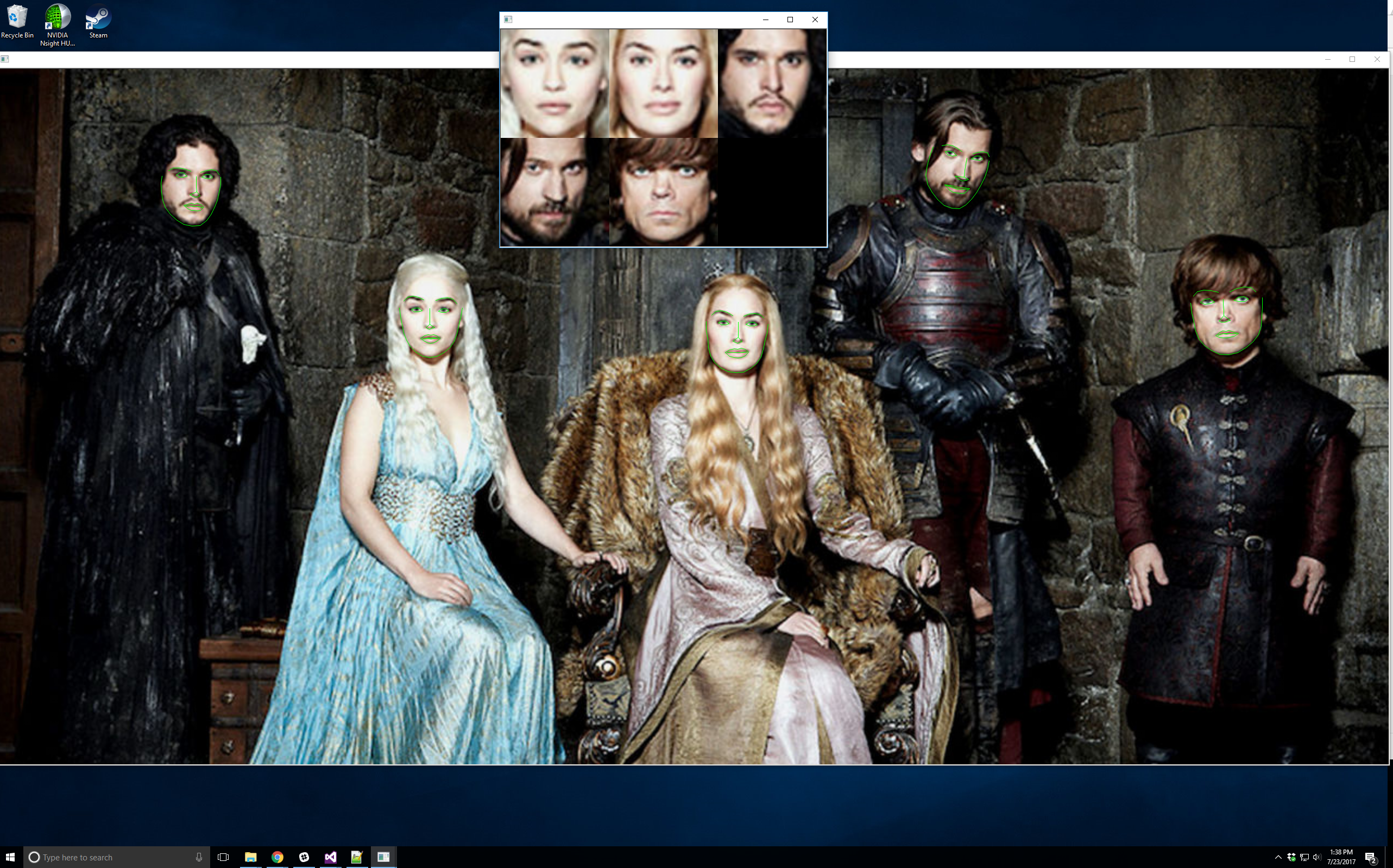
std::vector dets = detector(img);
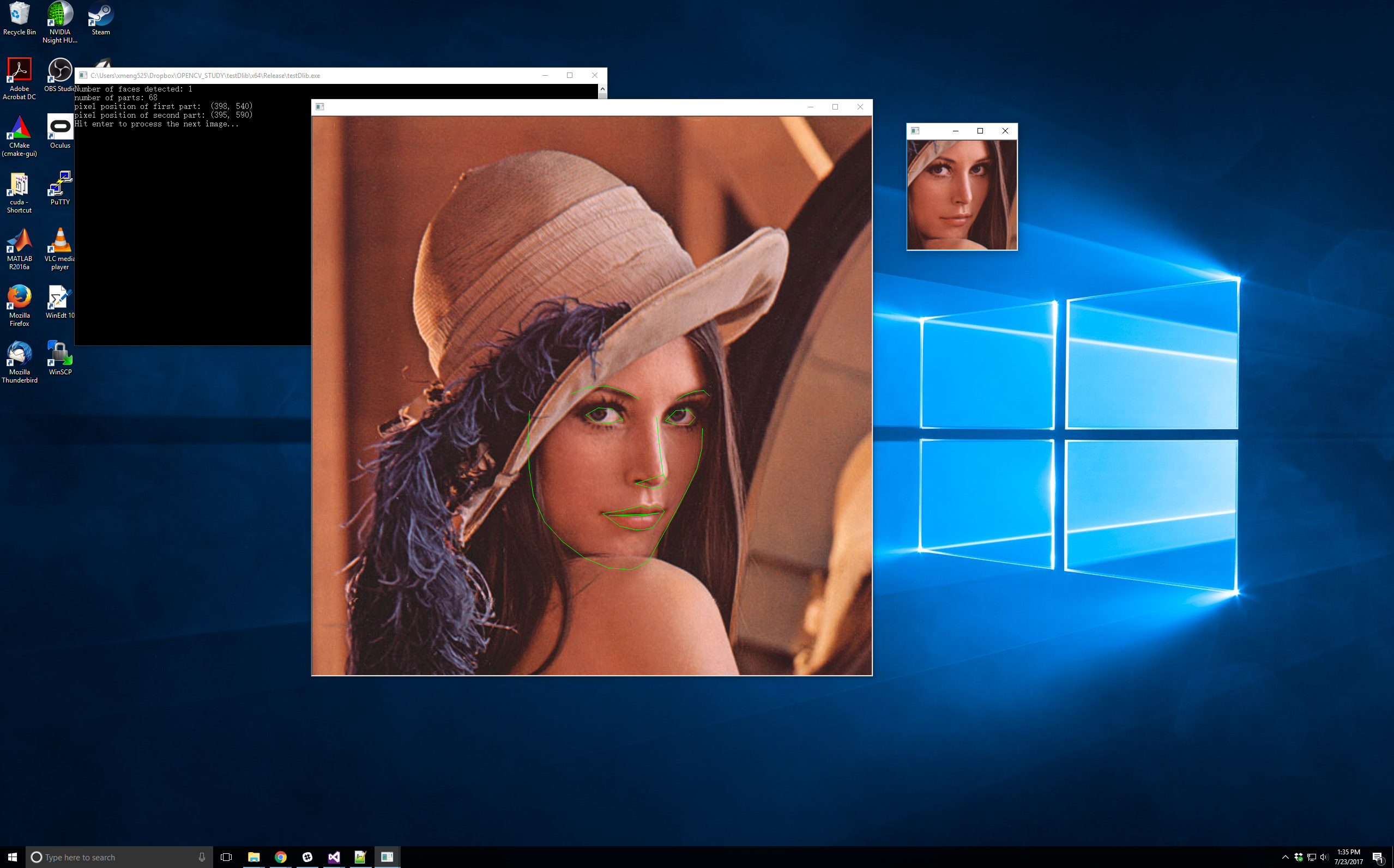
cout << "Number of faces detected: " << dets.size() << endl;
// Now we will go ask the shape_predictor to tell us the pose of
// each face we detected.
std::vector shapes;
for (unsigned long j = 0; j < dets.size(); ++j)
{
full_object_detection shape = sp(img, dets[j]);
cout << "number of parts: "<< shape.num_parts() << endl;
cout << "pixel position of first part: " << shape.part(0) << endl;
cout << "pixel position of second part: " << shape.part(1) << endl;
// You get the idea, you can get all the face part locations if
// you want them. Here we just store them in shapes so we can
// put them on the screen.
shapes.push_back(shape);
}
// Now let's view our face poses on the screen.
win.clear_overlay();
win.set_image(img);
win.add_overlay(render_face_detections(shapes));
// We can also extract copies of each face that are cropped, rotated upright,
// and scaled to a standard size as shown here:
dlib::array<array2d > face_chips;
extract_image_chips(img, get_face_chip_details(shapes), face_chips);
win_faces.set_image(tile_images(face_chips));
cout << "Hit enter to process the next image..." << endl;
cin.get();
//}
}
catch (exception& e)
{
cout << "\nexception thrown!" << endl;
cout << e.what() << endl;
}
}